Propuesta de identificación de uso y operador de montacargas en almacenes logísticos, caso: almacén UTeM.
Proposal for Identification of Forklift Usage and Operator in Logistics Warehouses, Case: UTeM Warehouse.
Universidad Tecnológica de Manzanillo
Por: Giovanni García Vargas y Ángel de Jesús González García.
Resumen
Se presenta la implementación de un sistema avanzado de identificación para operadores de montacargas en el almacén de la Universidad Tecnológica de Manzanillo (UTeM), con el objetivo de mejorar la gestión logística, la seguridad y la productividad. La contribución principal del estudio es la aplicación de tecnologías de reconocimiento facial y de patrones, utilizando el algoritmo Viola-Jones para la detección en tiempo real, lo que permite autenticar a los operadores y monitorear el uso de los montacargas. Se emplearon herramientas como Python y OpenCV para el desarrollo del sistema, utilizando el algoritmo Haar Cascade para la detección de rostros y vehículos. A través de la metodología de desarrollo de software ASD (Adaptative Software Development), se construyó y probó el sistema tanto en condiciones controladas como reales, demostrando su efectividad. Los resultados obtenidos validan la capacidad del sistema para mejorar la seguridad operativa, garantizando que solo operadores autorizados manejen los montacargas.
Palabras clave: detección de objetos, Haar Cascades, monitoreo.
Abstract
Efficient management of logistics warehouses is essential to optimize operations and reduce costs, and the precise identification of forklift operators plays a key role in improving safety and productivity. This paper explores how the implementation of advanced technologies, such as facial recognition and pattern recognition systems, can transform logistics practices at the Universidad Tecnológica de Manzanillo (UTeM). An advanced system is proposed to monitor and authenticate forklift operators, using the Viola-Jones algorithm for real-time detection, which has shown effectiveness under variable conditions.
Despite the benefits, there are challenges in integrating the system with existing management systems, training staff, and initial costs. However, long-term benefits, such as improved safety and efficiency, justify its implementation. This approach aims to demonstrate the feasibility of applying recognition technologies in a logistics environment.
The article describes the use of the ASD (Adaptive Software Development) methodology in the system's development, using Python and OpenCV for face and vehicle detection via the Haar Cascade algorithm. Tests are presented that validate the system's effectiveness under controlled and real-world conditions, highlighting its ability to improve operational safety by ensuring that only authorized operators handle forklifts.
Keywords: object detection, Haar Cascades, monitoring.
Introducción
La gestión eficiente de almacenes logísticos es esencial para optimizar las operaciones y minimizar los costos en el ámbito industrial. En este contexto, la identificación precisa de los operadores de montacargas y su uso es un aspecto clave para mejorar tanto la seguridad como la productividad en el entorno logístico. La implementación de tecnologías avanzadas, como los sistemas de reconocimiento de patrones y rostros, se presenta como una herramienta innovadora para abordar estos desafíos. Este trabajo se enfoca en el caso específico del almacén de la Universidad Tecnológica de Manzanillo (UTeM), explorando cómo un sistema de identificación avanzada puede transformar las prácticas logísticas tanto para los estudiantes locales como para los visitantes de otras instituciones y la industria.
En la actualidad, la UTeM enfrenta retos comunes en la gestión de inventarios y la operación de montacargas, tales como garantizar la seguridad de las y los estudiantes, el personal y la mercancía, además de optimizar el uso de los recursos disponibles. Con base en la metodología de detección de rostros y patrones, se propone la implementación de un sistema avanzado de identificación que permita monitorear y autenticar a los operadores de montacargas, mejorando así la seguridad operativa y facilitando la gestión eficiente de los recursos. Este tipo de sistemas ya ha mostrado resultados prometedores en aplicaciones industriales y educativas, como lo evidencian estudios previos en los que se utiliza el algoritmo de Viola-Jones para la detección en tiempo real de rostros y patrones, lo cual ha demostrado ser efectivo en diversas condiciones.
A pesar de los beneficios evidentes de la implementación de un sistema de identificación avanzado, existen desafíos significativos que deben ser abordados. Uno de los principales es la integración efectiva con los sistemas de gestión de almacenes existentes y la capacitación adecuada del personal, lo cual es crucial para minimizar interrupciones durante la transición hacia el nuevo sistema. Además, el costo inicial de adquisición e implementación puede ser una barrera para algunas instituciones. Sin embargo, este desafío debe ser evaluado considerando los beneficios a largo plazo, que no solo se traducen en ahorro de costos operativos, sino también en una mayor seguridad y eficiencia dentro del almacén.
Este enfoque busca demostrar que es posible aplicar tecnologías avanzadas de identificación y reconocimiento en un entorno logístico, abriendo un camino hacia la mejora continua de los procesos en el almacén de la UTeM y otras instituciones similares.
Objetivo
Analizar el desarrollo e implementación de un sistema avanzado de identificación para operadores de montacargas, evaluando su viabilidad técnica y funcionalidad, con el objetivo de determinar si fue posible crear una solución práctica que garantice el acceso exclusivo a operadores/as autorizados/as y contribuya a la seguridad en el entorno del almacén.
Planteamiento del problema
En la Universidad Tecnológica de Manzanillo, el simulador arancelario, reconocido como el más grande de la región, es un entorno crucial para la formación y práctica de habilidades logísticas. Dentro de este, la operación de montacargas constituye una actividad esencial, pero también presenta riesgos significativos tanto para la seguridad de las y los estudiantes y personal como para la integridad de los activos del simulador. La ausencia de un control adecuado sobre los operadores de montacargas puede resultar en accidentes graves, causando daños a los equipos y mercancías, y, más preocupante aún, poniendo en riesgo la vida de las y los usuarios. Actualmente, la ausencia de un sistema eficiente para identificar a las personas operadoras de montacargas genera riesgos significativos, como la incapacidad de rastrear quién está al mando de estos vehículos en momentos específicos. Esto puede derivar en accidentes debido al uso indebido por personal no autorizado, dificultades para asignar responsabilidades en caso de incidentes y una mayor exposición a daños tanto a empleados como a los activos del almacén.
Método de trabajo
Se utilizó la metodología ASD (Adaptative Software Development) para la programación de la propuesta de solución. Esta metodología se basa en ciclos de desarrollo iterativo e incremental, lo que permite adaptarse a los cambios y requerimientos del proyecto. Por otro lado, se elaboró un diagrama de Gantt para establecer las fechas de entrega y seguimiento del proyecto, asegurando una gestión eficiente del tiempo y los recursos.
Dentro de la metodología ASD se trabajó a través de tres fases para el desarrollo de la aplicación: especular, colaborar y aprender; esta es una metodología de desarrollo cuyo funcionamiento es cíclico y reconoce que en cada iteración se producirán cambios e incluso errores1. Esta metodología se basa en reconocer la naturaleza dinámica y evolutiva del desarrollo de software, permitiendo una respuesta ágil y flexible a medida que se descubren nuevas necesidades y se obtienen retroalimentación durante el proceso de desarrollo (Figura 1),
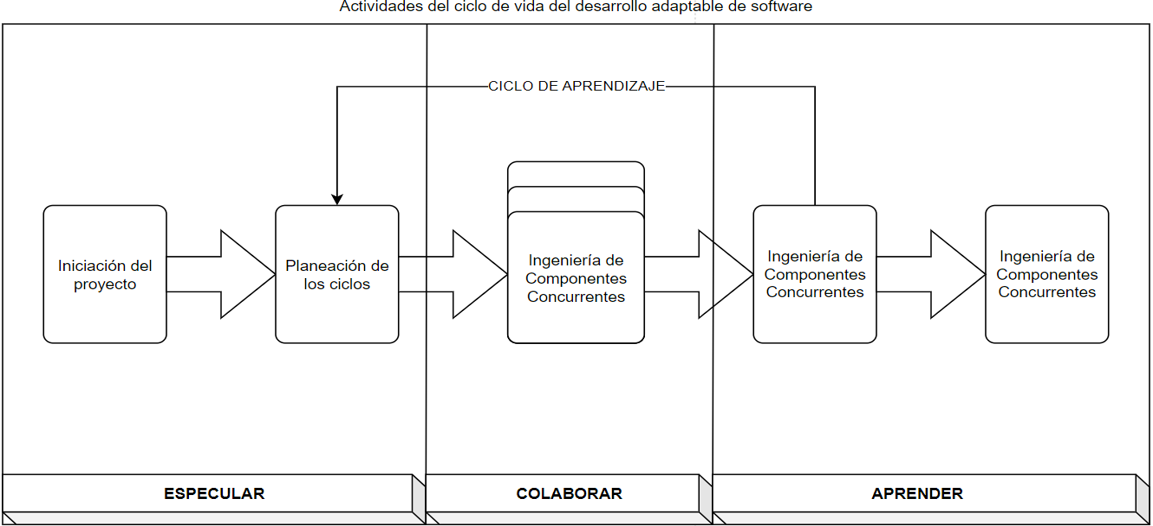
Figura 1. Fases para el desarrollo de la aplicación, de acuerdo con la metodología ASD1
Se utilizó el lenguaje de programación Python en conjunto con el IDE PyCharm para el desarrollo del mismo. Este es un lenguaje orientado a objetos e interpretado. Tiene una curva de aprendizaje bastante fácil de superar, así como una gran cantidad de librerías enfocadas al procesamiento de lenguaje natural que pueden hacer más sencillo el trabajo2.
Se utilizó la metodología de Haar Cascade para el reconocimiento de patrones, los cuales consistían en patrones simples de blancos y negros. Estos fueron empleados regularmente para detectar bordes, líneas y otros rasgos visuales.
Las técnicas y algoritmos utilizados para el reconocimiento de objetos se encuentran en pleno desarrollo. Actualmente se están buscando mejorar cuestiones como la precisión en la detección y la reducción en los tiempos de procesamiento3.
Si bien, el tema se encuentra en auge y existe vasta bibliografía, aquí no se pretende elaborar un estado del arte completo y documentado acerca del tema, interesa mostrar aquellas ideas que prevalecen y circulan en la comunidad académica.
Por ello, se describirán algunos de los estudios realizados sobre esta temática y cuáles son los potenciales usos que pueden lograrse con este tipo de herramienta.
Existen diversos estudios4, 5 que muestran la gran utilidad del reconocimiento de objetos en imágenes a través de Haar Cascades; principalmente se encuentran aquellos que refieren a reconocimiento facial, con múltiples usos como detección de caras y contornos de rostros, labios, etcétera, para distintos propósitos y aplicaciones6.
En sus inicios, la metodología de Haar Cascades fue aplicada por primera vez al reconocimiento de objetos (RO) por Viola y Jones7 en su artículo Robust Real-Time Object Detection. Dicho trabajo representó un intento inicial por reconocer rostros humanos, obteniendo resultados novedosos en términos de potencialidad, rapidez y precisión, logrando altas tasas de efectividad. Sin embargo, el algoritmo presentó ciertas limitaciones relacionadas con aspectos como la iluminación o el color. A pesar de ello, estas falencias no restaron importancia a la robustez y al carácter revolucionario de su implementación5.
El trabajo de Viola y Jones fue revisado y mejorado en artículos posteriores, como el estudio realizado por Hussein y Mutlag (2019), en el que se comparó el rendimiento del algoritmo de Viola-Jones con otros métodos de detección, como el modelo de color CIELAB. Este modelo, a diferencia del algoritmo de Viola-Jones, se enfoca en identificar si una región corresponde a piel humana, lo que lo convierte en una alternativa relevante en contextos específicos de detección facial y de patrones de color8.
Otro escrito9 contempla e introduce la característica del color de piel humano, reduciendo así la tasa de falsos positivos por color de piel y la detección incorrecta de caras.
Lo mismo sucede con trabajos que consiguieron mejorar la detección de rostros en fotos grupales considerando el color de piel y/o problemas con la iluminación10.
El reconocimiento de patrones, piedra angular de la visión por computadora, abarca un amplio espectro de aplicaciones, desde la detección de objetos en imágenes hasta la identificación facial y el seguimiento de movimientos. Entre las diversas técnicas disponibles, tres destacan por su relevancia y aplicación: Haar Cascade, histogram of oriented gradients (HOG) y redes neuronales convolucionales (CNN). Cada una de estas técnicas posee características únicas que las hacen idóneas para diferentes escenarios y requisitos de aplicación.
Para facilitar la comprensión de sus diferencias, se presenta una tabla comparativa que analiza en detalle las características clave de Haar Cascade en contraste con HOG y CNN. Esta tabla explora su rendimiento en términos de eficiencia computacional, precisión en la detección, flexibilidad para adaptarse a diferentes tipos de objetos, robustez frente a variaciones ambientales, requisitos de hardware y aplicaciones típicas.
Tabla 1. Comparativa entre diferentes herramientas de reconocimiento de patrones
| Herramienta / Característica | Haar Cascade | Histogram of oriented gradients (HOG) | Redes neuronales convolucionales (CNN) |
| Principio de funcionamiento | Basado en características locales y patrones simples de blancos y negros. | Basado en la orientación de gradientes de luz en la imagen. | Basado en redes neuronales que aprenden representaciones jerárquicas de características. |
| Eficiencia | Rápido en detección en tiempo real. | Rápido, pero menos eficiente que Haar Cascade en algunas situaciones. | Más lento, requiere de hardware potente para tiempos de respuesta rápidos. |
| Precisión | Bueno para objetos con patrones distintivos y claros. | Bueno para objetos bien definidos, puede variar con la complejidad del objeto. | Excelente para una amplia gama de objetos y variaciones. |
| Flexibilidad | Menos flexible, requiere reentrenamiento para diferentes tipos de objetos. | Más flexible que Haar Cascade en términos de variación de objetos. | Muy flexible, puede adaptarse a una variedad de objetos sin necesidad de reentrenamiento significativo. |
| Robustez ante condiciones variadas | Sensible a cambios de iluminación y fondo. | Moderadamente robusto ante cambios de iluminación y fondo. | Robusto ante variaciones moderadas de iluminación y fondo. |
| Requerimientos de hardware | Menos exigente, adecuado para aplicaciones embebidas y dispositivos ligeros. | Moderadamente exigente, puede requerir hardware potente para aplicaciones intensivas. | Más exigente, requiere GPUs (unidades de procesamiento gráfico) o hardware especializado para aplicaciones en tiempo real. |
Se procedió inicialmente a verificar la disponibilidad de la biblioteca OpenCV, fundamental para la detección de rostros y vehículos. Esto se realizó mediante la búsqueda e instalación del paquete "opencv-python" en las extensiones disponibles (Figura 2)
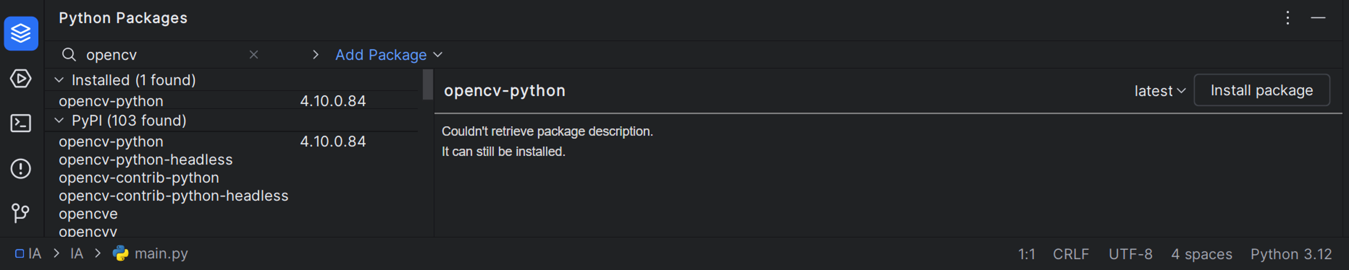
Figura 2. Verificación de instalación de OpenCV. Elaboración propia
El código se inició con la importación de cv2, la cual corresponde a OpenCV y proporciona herramientas robustas para el procesamiento de imágenes, incluyendo filtrado, detección de bordes, reconocimiento de características y seguimiento de objetos.(Figura 3).

Figura 3. Importación de librería OpenCV
Se definió la función detect-objects para configurar los clasificadores Haar Cascade necesarios. En este caso, se implementaron dos: uno para la detección de rostros y otro para la detección de vehículos (Figura 4).

Figura 4. Definición de función detect-objects
Posteriormente, se agregó código para identificar y delimitar los rostros detectados en la imagen mediante un rectángulo.(Figura 5).

Figura 5. Identificación de rostros
Luego, se implementó el código para detectar vehículos, haciendo uso del clasificador Haar Cascade correspondiente. La sintaxis utilizada fue cars = cars_cascade.detectMultiScale(gray, 1.1, 4): (Figura 6).
Donde
cars_cascade: objeto del tipo CascadeClassifier inicializado para la detección de vehículos.
detectMultiScale: método de CascadeClassifer utilizado para detectar objetos de diferentes tamaños en la imagen.
gray: imagen convertida a escala de grises para facilitar el procesamiento.
1.1: parámetro scaleFactor que especifica la reducción de tamaño de la imagen en cada escala de la pirámide de imágenes.
4: parámetro minNeighbors que indica cuántos vecinos debe tener cada candidato a rectángulo para ser retenido como detección.

Figura 6. Identificación de vehículos
Una vez configurados los clasificadores, se procedió a cargarlos en el sistema. (ver la figura siguiente).

Figura 7. Cargado de cascades necesarios
Resultados
A continuación se presentan pruebas visuales del funcionamiento del sistema:
En la siguiente imagen se puede observar que el detector de “Caras” funciona correctamente.
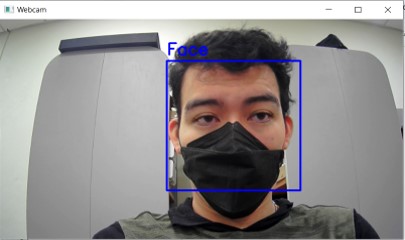
Figura 8. Detección correcta de rostros utilizando el detector de caras
En la imagen que sigue es posible observar que identifica correctamente lo que es un carro.

Figura 9. Identificación precisa de vehículos mediante el detector correspondiente
En Figura 10 se observa que el programa reconoce los elementos tanto “cara” como “carro” de manera separada, esto con el fin de poder saber si puede reconocer dos tipos de elementos diferentes estando juntos.

Figura 10. Prueba exitosa de detección simultánea de rostros y vehículos
Se añaden pruebas adicionales del sistema en funcionamiento en entornos reales, con el propósito de evaluar exhaustivamente su desempeño e identificar cualquier área que requiera ajustes o mejoras en el código (Figura 11). Estas pruebas son fundamentales para validar la fiabilidad y precisión del sistema en condiciones reales de uso, asegurando así su adecuada funcionalidad antes de la implementación completa (Figura 12).

Figura 11. Pruebas de uso en Almacén Logístico UTeM

Figura 12. Pruebas de uso en almacén logístico UTeM
En la Tabla 2 se analizan los resultados obtenidos con relación a la problemática a solucionar y el objetivo establecido.
Tabla 2. Análisis de resultados
| Artefacto | Resultado |
| Detección de rostros | El sistema logró detectar y delimitar correctamente los rostros presentes en las imágenes de prueba. La detección fue precisa y efectiva, incluso en condiciones variables de iluminación y fondo. |
| Detección de vehículos | Se implementó la detección de vehículos utilizando el clasificador Haar Cascade correspondiente. El sistema identificó vehículos con alta precisión, adaptándose adecuadamente a diferentes tamaños y orientaciones dentro de las imágenes analizadas. |
| Detección simultánea de rostros y vehículos | Se probó la capacidad del sistema para detectar simultáneamente rostros y vehículos en una misma imagen. Los resultados mostraron que el sistema puede identificar ambos tipos de objetos de manera independiente y precisa en escenarios complejos donde ambos están presentes. |
| Validación en entornos reales | Se llevaron a cabo pruebas en entornos reales para evaluar el desempeño del sistema bajo condiciones operativas reales. Las pruebas demostraron la fiabilidad del sistema, mostrando resultados consistentes y efectivos en la detección de rostros y vehículos en condiciones dinámicas y variadas. |
La Tabla 3 proporciona un resumen completo de los aspectos clave discutidos para cada tipo de detección (rostros, vehículos y detección simultánea), destacando tanto sus fortalezas como las áreas que pueden requerir mejoras o ajustes en aplicaciones prácticas.
Tabla 3. Discusión de resultados
| Aspecto | Detección de rostros | Detección de vehículos | Detección simultánea de rostros y vehículos |
| Eficiencia en la detección | Rápida y eficiente, adecuada para aplicaciones en tiempo real. | Rápida y eficaz, ideal para aplicaciones logísticas con necesidades de respuesta inmediata. | Destacada capacidad para detectar ambos objetos simultáneamente, mostrando versatilidad en escenarios complejos. |
| Precisión y fiabilidad | Aceptable precisión bajo condiciones controladas, con necesidad de ajustes en escenarios desafiantes. | Adecuada precisión en condiciones controladas, vulnerable a cambios extremos de iluminación y fondos complejos. | Aceptable precisión bajo condiciones controladas, con desafíos adicionales en escenarios dinámicos. |
| Flexibilidad y adaptabilidad | Menos flexible en comparación con técnicas avanzadas como CNN. | Limitada adaptabilidad ante variaciones ambientales y tipos de vehículos diversos. | Adaptabilidad limitada, sugiriendo la necesidad de técnicas combinadas para mejorar la respuesta. |
| Validación en entornos reales | Confirmada su efectividad en entornos reales, con variaciones en la precisión bajo condiciones no controladas. | Validado su rendimiento efectivo en entornos operativos reales, con desafíos en precisión en condiciones no controladas. | Viabilidad demostrada en entornos operativos reales, con áreas identificadas para mejoras en precisión. |
Discusión
La solución desarrollada muestra resultados prometedores en relación con la detección de rostros y vehículos, así como en la identificación simultánea de ambos. Tras analizar los resultados, se observa que el sistema tiene fortalezas claras, como su capacidad para realizar detecciones precisas en condiciones controladas y su adaptabilidad en entornos reales. Sin embargo, también se identifican áreas de mejora, especialmente en escenarios dinámicos y con condiciones adversas.
En cuanto a la reducción de riesgos, que era el objetivo inicial, los resultados sugieren que la solución podría contribuir significativamente a este propósito, especialmente al proporcionar detecciones confiables en tiempo real. Este aspecto es es particularmente valioso en aplicaciones prácticas donde la identificación precisa de personas y vehículos puede prevenir incidentes, mejorar la seguridad y optimizar procesos logísticos. No obstante, los desafíos en escenarios con iluminación variable, fondos complejos o entornos dinámicos indican que aún hay margen para fortalecer la robustez y precisión del sistema, lo cual es crucial para maximizar su impacto en la mitigación de riesgos.
Por lo tanto, aunque la solución muestra un nivel adecuado de efectividad en la reducción de riesgos, también se concluye que el objetivo principal se ha cumplido en cuanto a demostrar que es posible desarrollar una aplicación que utilice reconocimiento de rostros y patrones. Esto valida la viabilidad técnica de la aplicación y establece una base sólida para seguir mejorando la precisión y flexibilidad del sistema, utilizando, por ejemplo, técnicas más avanzadas como redes neuronales convolucionales, para hacerla aún más efectiva en escenarios reales.
Conclusiones
La propuesta de implementación de un sistema de identificación de uso y operador de montacargas en el almacén de la Universidad Tecnológica de Manzanillo (UTeM) ha sido un paso crucial para mejorar la gestión logística y la seguridad operativa. Durante el proceso de desarrollo, se aplicó la metodología ASD (Adaptative Software Development), lo que permitió una planificación flexible y adaptativa frente a los desafíos encontrados en cada fase. En la etapa de diseño, se definieron claramente los requerimientos y la estructura del sistema, utilizando tecnologías como Python y OpenCV, así como el algoritmo Viola-Jones para la detección en tiempo real, lo que permitió una integración eficiente de los componentes. Durante la implementación se desarrollaron las herramientas necesarias para la autenticación de operadores mediante el algoritmo Haar Cascade, lo cual validó su efectividad en condiciones reales y controladas.
A lo largo de la investigación, se enfrentaron desafíos, como la integración del modelo con los sistemas de gestión existentes y la capacitación del personal. No obstante, se superaron mediante un enfoque colaborativo con asesores técnicos y académicos, quienes orientaron el proceso de adaptación del sistema a las necesidades específicas del entorno logístico de la UTeM.
Como resultado, la implementación del sistema no solo incrementará la seguridad al garantizar que solo operadores autorizados manejen los montacargas, sino que también optimizará los recursos y facilitará el cumplimiento de regulaciones vigentes. Estos resultados destacan la capacidad del sistema para mejorar la productividad y la eficiencia operativa, ofreciendo un impacto positivo a largo plazo.
Este proyecto contribuye al área de conocimiento en la identificación y autenticación de operadores mediante tecnologías avanzadas, y su transversalidad con áreas como la informática, la seguridad industrial y la ingeniería de sistemas facilita la integración de soluciones tecnológicas en diferentes sectores. La interoperabilidad del sistema abre la puerta a su implementación en otros entornos, ampliando el impacto de la investigación más allá del ámbito logístico y promoviendo la innovación en diversos campos, lo que marca un precedente para futuras innovaciones en la gestión logística en entornos educativos y empresariales.
Referencias
1. RIVERO, Jenny y Torres Guerrero, Kennymar. Desarrollo Adaptable de Software (ASD). [En línea]. Marzo de 2014. [Fecha de consulta: 01 de julio de 2024]. Universidad Nacional Experimental de los Llanos Occidentales “Ezequiel Zamora”. Disponible en https://darjelingsilva.wordpress.com/wp-content/uploads/2018/05/1-metd-asd.pdf
2. FLORES Hernández, S. R. Sistema de supervisión y control del taller de manufactura integrada por computadora usando RFID. Ciudad de México: Universidad Nacional Autónoma de México. 2011.
3. CONGRESO Nacional de Ingeniería Informática/Sistemas de Información CoNaIISI. (2º, 2014, San Luis, Argentina). OSIMANI, César. Análisis y procesamiento de imágenes para la detección del contorno labial en pacientes de odontología. 2014. Ciudad de Buenos Aires. Actas del segundo congreso, p. 147. ISSN: 2346-9927.
4. Guevara, M.L.; Echeverry, J.D. y Ardilla Urueña, W. (2008). Detección de rostros en imágenes digitales usando clasificadores en cascada. Scientia et Technica, XIV, 38, 1-6. Disponible en: http://revistas.utp.edu.co/index.php/revistaciencia/article/view/3679/2069
5. RODRÍGUEZ BAQUE, Karen Elizabeth. Análisis e implementación del algoritmo de detección facial de Viola-Jones. [Tesis]. 2017. Universidad Técnica del Norte. Ibarra, Ecuador. Disponible en: https://repositorio.utn.edu.ec/bitstream/123456789/7315/1/04%20MEC%20204%20TRABAJO%20DE%20GRADO.pdf
6. LUH, Guan Chun. Face detection using combination of skin color pixel detection and Viola-Jones face detector. International Conference on Machine Learning and Cybernetics. Lanzhou, China. 2014, pp. 364-370. Disponible en https://ieeexplore.ieee.org/abstract/document/7009143
7. VIOLA, P. and Jones, M. Rapid Object Detection using a Boosted Cascade of Simple. Features. IEEE International Conference on Computer Vision and Pattern Recognition. [En línea]. Vol. 1, pp. 511–518. 2001. [Fecha de consulta: 01 de julio de 2024]. Disponible en https://ieeexplore.ieee.org/document/990517 ISSN: 1063-6919.
8. HUSSEIN, Maryam and Mutlag, Ammar Hussein. (2019). Face Detection Methods a Comparative Study between Viola-Jones and Skin Color Detection. Journal of Engineering and Applied Sciencies. [En línea]. 14 (14): 4754 – 4760. Diciembre 2019. [Fecha de consulta: 01 de julio de 2024]. Disponible en https://www.researchgate.net/publication/333489205_Face_Detection_Methods_a_Comparative_Study_between_Viola-Jones_and_Skin_Color_Detection ISSN 2536-9512
9. AKHAND, M.A.H., Akash, Anik and Mollah, A. S. Improvement of Haar Feature Based Face Detection in OpenCV Incorporating Human Skin Color Characteristic. International Journal of Computer Applications & Information Technology. [En línea]. 1 (1): 8. November 2016 [Fecha de consulta: 02 de julio de 2024]. https://www.researchgate.net/publication/310443424_Improvement_of_Haar_Feature_Based_Face_Detection_in_OpenCV_Incorporating_Human_Skin_Color_Characteristic ISSN: 2278-7720.
10. SAYANTAN, Thakur; Sayantanu, Paul; Ankur, Mondal; Swagatam, Das .; Ajith, A. (2012). Face detection using skin tone segmentation. World Congress on Information and Communication Technologies, Mumbai, India. Disponible en https://ieeexplore.ieee.org/document/6141217
| Fecha de recepción | Fecha de aceptación | Fecha de publicación |
|---|---|---|
| 10/07/2024 | 19/11/2024 | 30/05/2025 |
| Año 12, Número 3. Mayo - Agosto, 2025. | ||
|
Universidad Tecnológica de León. Todos los Derechos Reservados 2013 - 2025 |
