Año 8, Número 1. Septiembre - Diciembre, 2020. 
Modulación de ancho de pulso con monitoreo de temperatura y RPM de un motor universal
Pulse width modulation with monitoring temperature and RPM of a universal motor
Universidad Tecnológica del Norte de Coahuila
Por: Miriam Zulema González Medrano, Raúl Zambrano Rangel y Jesús Arturo Hernández Soberón / Ver en pantalla completa
Resumen
Donde quiera que exista un proceso mecánico, existe de por medio un motor ya sea trifásico o monofásico. Por lo tanto, el debido mantenimiento preventivo de los motores en un proceso productivo que es esencial para una empresa dedicada a procesos de automatización; y dado que gran parte de las fallas en motores son por sobrecalentamiento, se determinó el desarrollo de un sistema de monitoreo de la temperatura de un motor para modular su velocidad y evitar su sobrecalentamiento.
El objetivo se basó en el diseño de un dispositivo de modulación de ancho de pulso de la temperatura de un motor universal. El monitoreo de la temperatura se llevó a cabo controlando las revoluciones por minuto (RPM) a tres velocidades, utilizando el software TIA Portal con una interfaz basada en la programación HMI (Interfaz Hombre-Máquina). Como resultado se realizó la simulación con el software, el PLC 1215c DC/DC/DC y la HMI virtuales.
Palabras clave: PLC, HMI, PWM, motor, temperatura.
Abstract
Wherever there is a mechanical process, there is a motor either three-phase or single-phase motor. Therefore, the proper maintenance of the engines in a production process is essential for a company dedicated to automation processes; and given that a large part of the motor failures are due to overheating, the development of a motor temperature monitoring system was chosen to modulate its speed and avoid overheating.
The objective was based on the design of a temperature-pulse modulation device for a universal motor. To do this, a temperature monitoring system was developed controlling the revolutions per minute at three speeds, using a TIA-portal software with an interface based on HMI programming (Human-Machine Interface). As a result, the simulation was performed with the software, the 1215c DC / DC / DC PLC and the virtual HMI.
Keywords: PLC, HMI, PWM, engine, temperature.
Introducción
En la actualidad todo sistema automático en la industria lleva consigo un motor, por ello es que este elemento del sistema es importante; y cabe destacar que mediante un adecuado monitoreo es posible prevenir algún tipo de fallo en el proceso de producción.
En la industria, si el operario con instrucciones de incrementar el tiempo de producción, aumenta la velocidad de un motor universal, llevaría al sobreesfuerzo del motor y en consecuencia a elevar la temperatura, ocasionando un paro en la producción. Se desarrolló un sistema de monitoreo de temperatura con una medición automática de su velocidad, controlando las RPM (revoluciones por minuto) a tres velocidades respecto a su temperatura; la intención de utilizar tres velocidades es para demostrar a nuestros alumnos que se pueden utilizar diferentes porcentajes del ciclo de trabajo o controlar desde 0 % hasta el 100 %.
La programación del PLC (controlador lógico programable) del tipo ST1200, se desarrolló en el software TIA-portal (Totally Integrated Automation), y la interfaz fue basada en la programación HMI (Interfaz Hombre-Máquina).
Para el aislamiento del sistema de potencia se utilizaron optoacopladores marca MOC, y los TRIAC (triodo para corriente alterna) fueron esenciales para la modulación por ancho de pulsos (PWM) para un monitoreo eficaz de su temperatura y velocidad, visualizado en un interfaz sencillo para el operador de dicho motor.
Se puede agregar un porcentaje de ciclos, ya que el ciclo de trabajo es la relación existente entre el tiempo en que una señal se encuentra en estado activo con el periodo de esta: Para calcular el ciclo de trabajo se realiza con la siguiente fórmula:
Ciclo de trabajo = (100)*(TH/TW)
Por lo tanto se pueden calcular diferentes porcentajes del ciclo de trabajo.
Los sistemas mecatrónicos virtuales que reproducen sistemas reales son diseñados en un software de realidad virtual inmersiva y presentados en un monitor adicional de PC con la característica de que puede ser interconectado con dispositivos de control físicos externos ( PLC, PC Industrial, FPGA, etcétera), de tal manera que el o la estudiante pueda desarrollar aplicaciones reales de control para sistemas mecatrónicos industriales emulados en una PC que se asemejan a procesos reales, que les permita experimentar una gran diversidad de problemas de casos reales de automatización.1
Objetivo general
Desarrollar una modulación de pulso con monitoreo de temperatura de un motor universal, controlando a su vez las RPM a tres velocidades respecto a la temperatura.
Objetivos específicos
- Realizar la programación del PWM y sensor PT100.
- Realizar la programación del HMI.
- Diseñar la etapa de potencia con optoacopladores y TRIACs, incluyendo los cálculos.
- Realizar la simulación en TIA Portal.
Planteamiento del problema
Los motores eléctricos son una parte esencial de nuestra vida diaria, ya que muchos sistemas, aplicaciones y servicios dependen de ellos. Actualmente, los motores tienen una larga vida útil y requieren de mantenimiento para garantizar que funcionen de manera eficiente. En procesos de la industria, los motores deben mantenerse regularmente en buen estado porque necesitan estar en operación todo el tiempo; un pequeño problema podría causar una gran pérdida para la organización.2
En cuanto a los tipos de motores eléctricos genéricamente se clasifican en monofásicos, que contienen un juego simple de bobinas en el estator, y polifásicos (que mantienen dos, tres o más conjuntos de bobinas dispuestas en círculo).3
El objetivo se enfoca en el calentamiento de un motor eléctrico y en poder monitorearlo mediante un PLC (Programmable Logic Controller), mostrándolo mediante una HMI (Human Machine Interface).
El motor monofásico es una máquina rotativa que convierte energía eléctrica en energía mecánica4. Como es el caso del motor principal, el mantenimiento correctivo del equipo es una práctica muy costosa, ya que implica paros no programados y daños provocados por las fallas de los equipos. Las actuales exigencias de calidad consideran cada vez más necesaria la utilización de sistemas de monitoreo y detección de fallas, de modo que no se interrumpa la producción. Los motores eléctricos de inducción son los responsables, en muchos casos, del correcto funcionamiento del sistema productivo, por ello es necesario deshacerse de este problema en el mantenimiento correctivo, de ahí la importancia de su monitoreo.
Método de trabajo
La primera etapa de este proyecto consiste en recolectar información para llevar a cabo la comunicación entre PLC y HMI. a fin de cumplir con los objetivos antes planteados.
El HMI Basic Panel es un panel táctil de 7" con teclas adicionales y pertenece a la nueva serie de iniciación HMI de Siemens para aplicaciones sencillas. Los paneles Basic son los componentes HMI ideales para los sistemas de control S7 pequeños y medianos.5
Se organizó la programación de diagrama ladder por medio de la aplicación de programación de TIA Portal para PLC de la marca SIEMENS, esta estructura se puede visualizar en la Figura 1.
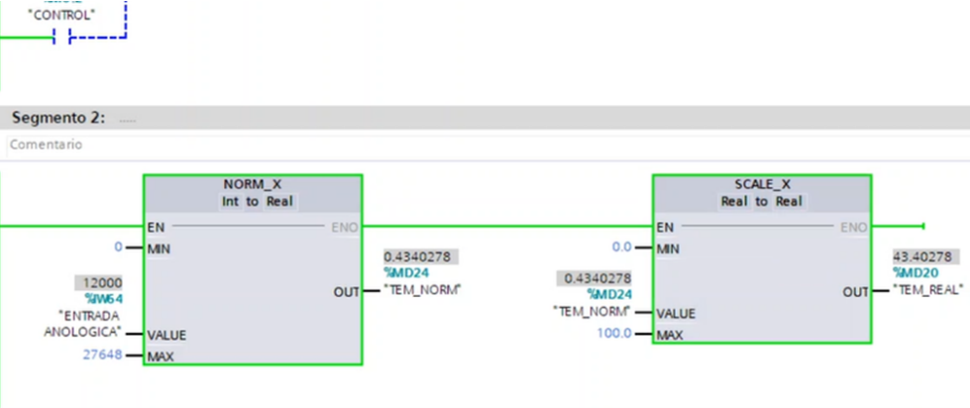
Figura 1. Programación de PLC S71200. Fuente: elaboración propia.
Totally Integrated Automation Portal (TIA Portal) v14 sp1 de Siemens integra diferentes productos SIMATIC en una aplicación de software que permite aumentar la productividad y eficiencia de la automatización en todos los sectores, cubriendo gran parte de las etapas de las que consta el proceso de automatización, como las de diseño, puesta en marcha y mantenimiento.1
Fueron escaladas las entradas analógicas con el bloque de función NORM_X y escalado con el bloque SCALE_X, esto para visualizar los parámetros de entrada del sensor.
Para poder controlar la velocidad del motor se debe utilizar el bloque CTRL_PWM_DB para lograr una modulación de ancho de pulso, este controla la intensidad con la variable %IW1000. En la Figura 2 se visualiza esta función.

Figura 2. Programación de PLC S71200 PWM. Fuente: elaboración propia.
Para lograr la variación se utiliza la función del bloque MOVE, esto para cambiar la variable %IW1000. En esencia, el PWM trabaja como si éste fuera un interruptor que se enciende y apaga constantemente, controlando de esta manera la cantidad de potencia que la carga (ejemplos: motor, bomba, lámpara) obtiene para su funcionamiento. Asociado al término PWM aparece el concepto de ciclo de trabajo (Duty Cycle en Ingles), el cual me indica qué tanto porcentaje de la señal debe llegar a la carga para suministrar potencia y permitir funcionamiento. Dicho de otra manera, si el ciclo de trabajo está al 0% la carga no está en funcionamiento; al estar al 100% del ciclo de trabajo, la carga se encuentra a su máxima potencia. Esto quiere decir que la carga conectada al sistema tendrá una cantidad de potencia según el valor del ciclo de trabajo.6
Con la programacion del HMI se logra visualizar todas las variables establecidas en la programacion tipo ladder. En la Figura 3 se visualiza cómo será la estructura de la interfaz humano-máquina.

Figura 3. Programación de HMI. Fuente: elaboración propia.
La conexión entre la PC y el PLC S7 1200 se realiza mediante una conexión alambrica con cable RJ45 con entrada Ethernet; para poder realizar la conexión del HMI con los tres componentes se utiliza un modem.
La conexión PC y PLC se muestra en la Figura 4.
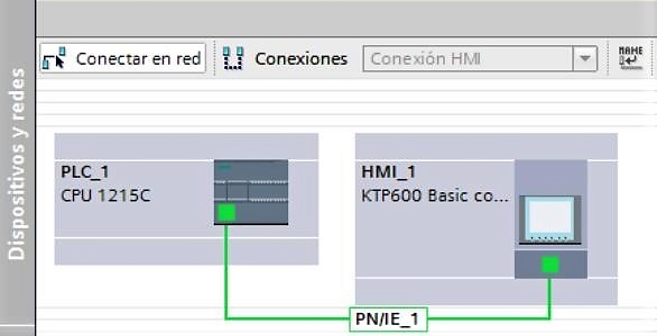
Figura 4. Interconexión entre PC y PLC S71200. Fuente: elaboración propia.
Las variables de toda la programación se muestran en una tabla de variables establecidas por su tipo, por ejemplo, la palabra BOOL que solo guarda 1 y 0, como también INT que almacena más que solo un bit, o el REAL que almacena números, tal como se muestra en la Figura 5.
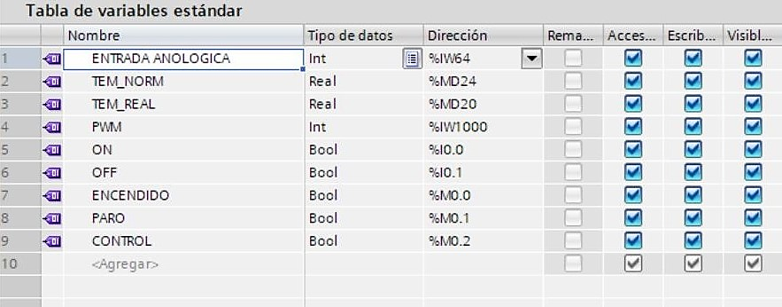
Figura 5. Tabla de variables. Fuente: elaboración propia.
Los diagramas aplicables son simples. El primero es el circuito de potencia aislado con un MOC3011, donde se aísla el alto voltaje por medio del mejor aislante: el espacio libre, como se muestra en la Figura 6.
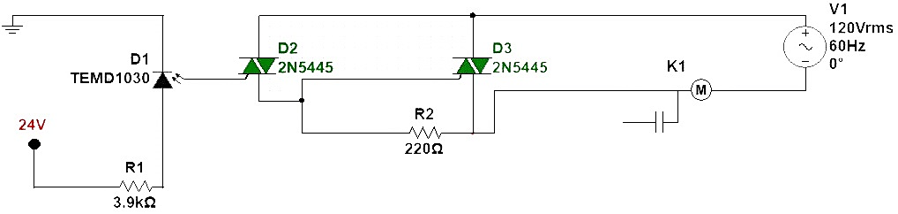
Figura 6. Circuito de potencia. Fuente: elaboración propia.
Para poder mostrar las RPM en el HMI se debe configurar para poder contar las veces que el encoder obstruye el sitio de punteo, esto se logra mediante un led infrarrojo y un fototransistor, para lograr esto, al momento se cuentan los pulsos. Se muestra en la Figura 7.
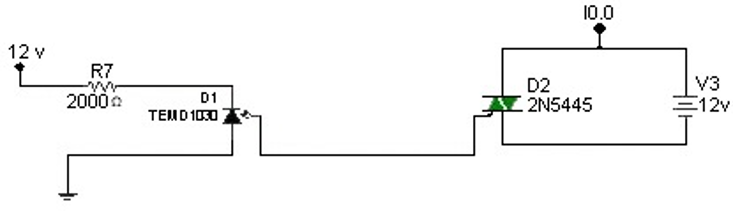
Figura 7. Led infrarrojo y fototransistor. Fuente: elaboración propia.
Las RPM (revoluciones por minuto) son la cantidad de vueltas que un cuerpo giratorio completa alrededor de su eje cada sesenta segundos.7
Para lograr una configuración óptima para el PT100, con el cual se mide la temperatura del motor, se configura para lograr un equilibrio entre las cuatro resistencias, mostrando un voltaje entre 1-10 volts para la configuración de puertos A0, como se observa en la Figura 8.
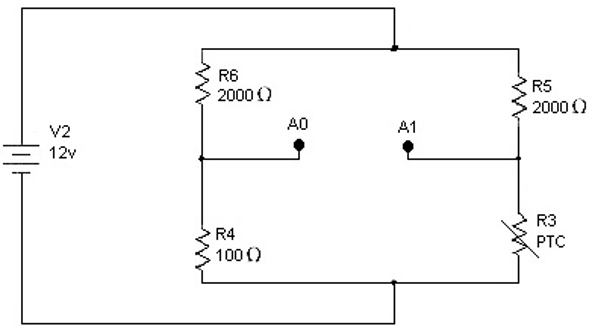
Figura 8. Circuito de acondicionamiento PT100. Fuente: elaboración propia.
Dependiendo de la temperatura, el motor trabaja a más o menos revoluciones. Cuando varía el ciclo de trabajo, varía la velocidad ya que cambia la tensión media en el bobinado del motor. Con un ciclo de trabajo de 100 %, el motor girará a la máxima velocidad. Al reducir el ciclo de trabajo, se reducirá la velocidad.
Se realiza la toma de temperatura en tres velocidades diferentes observando el cambio de temperatura con relación a las RPM, tal como lo muestran las figuras 9, 10 y 11.
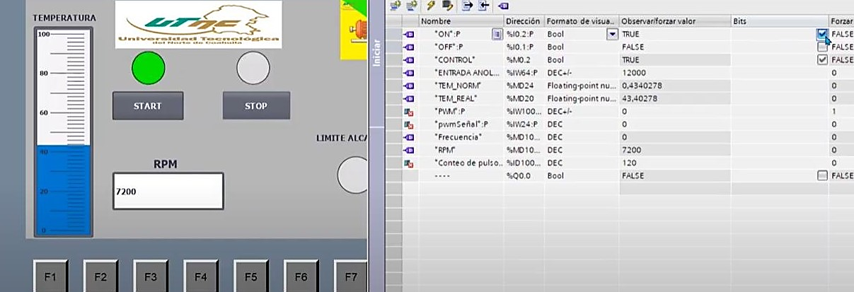
Figura 9. Toma de temperatura a 7200 RPM, 45º temperatura máxima. Fuente: elaboración propia.
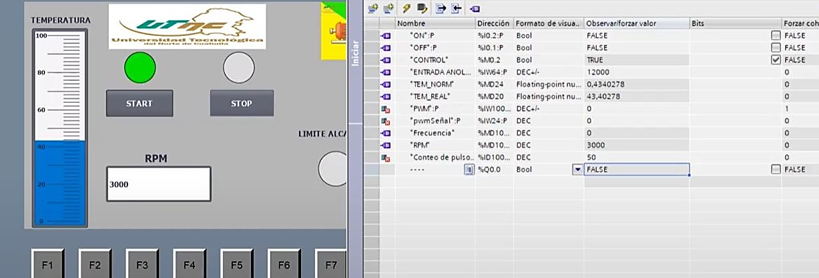
Figura 10. Toma de temperatura a 3000 RPM, 35º. Fuente: elaboración propia.

Figura 11. Toma de temperatura a 1500 RPM, 20°. Fuente: elaboración propia.
Conclusiones
Se logró desarrollar la modulación de pulso con monitoreo de temperatura de un motor universal, controlando a su vez las revoluciones por minuto a tres velocidades respecto a la temperatura, mediante la simulación con el Software TIA Portal, con el PLC 1215c DC/DC/DC y la HMI virtuales.
Referencias
1. PUMASUPA PARO, Dani Daniel. Diseño de red industrial Ethernet, con autómatas programables, HMI Siemens y sistemas de control inteligente aplicado a sistemas mecatrónicos en entorno de realidad virtual. [En línea]. 2017. [Fecha de consulta: 29 de mayo de 2020.] http://repositorio.uancv.edu.pe/handle/UANCV/1485.
2. MORALES MONTERO, Juan Francisco. Metodología para el análisis de fallas en los motores eléctricos por medio del estudio termográfico. [En línea]. Universidad Católica de Santiago de Guayaquil. 25 de agosto de 2018. [Fecha de consulta: 12 de abril de 2020], Disponible en http://192.188.52.94:8080/handle/3317/11358
3. CALVOPIÑA ESQUIVEL, Guido Hernán y QUIMUÑA LLUMIQUINGA, Pedro Diego. Diseño e implementación de un controlador de velocidad de un motor monofásico utilizando la técnica de control mediante modulación de ancho de pulso sinusoidal (SPWM) de dos y tres niveles. [En línea] 2011. [Fecha de consulta: 12 de mayo de 2020]. Disponible en https://bibdigital.epn.edu.ec/bitstream/15000/3865/1/CD-3668.pdf
4. SOLER & PALAU VENTILATION GROUP. ¿Qué es un motor monofásico? Características, tipologías y aplicaciones. [En línea]. 16 de diciembre de 2019. [Fecha de consulta: 12 de abril de 2020]. Disponible en https://www.solerpalau.com/es-es/blog/motor-monofasico/
5. FESTO-DIDACTIC. Trainer Package SIMATIC Basic Panel KTP700 [En línea]. Fecha de consulta: 12 de abril de 2020.] Disponible en https://www.festo-didactic.com/int-es/learning-systems/mps-sistema-de-produccion-modular/control-redes/con-siemens-s7/trainer-package-simatic-basic-panel-ktp700.htm?fbid=aW50LmVzLjU1Ny4xNC4xOC42MTAuODIwMQ
6. INGENIERO MARROQUIN. Modulación de ancho de pulso (PWM) [En línea] 04 de octubre de 2017. [Fecha de consulta: 18 de mayo de 2020] https://ingmarroquin.wixsite.com/2016/single-post/2017/10/04/MODULACI%C3%93N-POR-ANCHO-DE-PULSO-PWM-CONCEPTOS-CLAVE
7. PÉREZ PORTO, Julián y MERINO, María. Definición.de RPM. [En línea] 2016. Disponible en https://definicion.de/rpm/
| Fecha de recepción | Fecha de aceptación | Fecha de publicación |
|---|---|---|
| 14/04/2020 | 10/06/2020 | 30/09/2020 |
| Año 8, Número 1. Septiembre - Diciembre, 2020. | ||



