Año 5, Número 2. Enero - Abril, 2017 
Eficiencia de las redes neuronales para la toma de decisiones en el sector agrícola análisis exploratorio
Efficiency of neural networks for decision making in the agricultural sector exploratory analysis
Por: Eduardo Berra Villaseñor / Ver en pantalla completa
Resumen
El presente artículo revisa las técnicas ocupadas en la agricultura de precisión, específicamente las técnicas de análisis lineales de datos y la clasificación de suelos, mediante las redes neuronales para la toma de decisiones. La investigación se focalizó en dos técnicas básicas, análisis de datos históricos y análisis de imágenes para la clasificación por kilogramos y de imágenes, realizando una comparativa de los resultados de las redes neuronales empleadas.
Palabras clave: Redes neuronales, Actividad Agrícola, Agricultura de precisión, Toma de decisiones, Análisis para la predicción.
Abstract
In the present article, a revision of the techniques occupied in the agriculture of precision is carried out, specifically the techniques of lineal analysis of data and the classification of soils, by means of the neural networks for the taking of decisions, the investigation was focused in two basic techniques, historical data analysis and image analysis, for the classification by Kilo grams and images, making a comparison of the results of the neural networks used.
Key words: Neural networks, Agricultural Activity, Precision Agriculture, Decision making, Analysis for prediction.
Introducción
La agricultura mundial viene enfrentando, a lo largo del tiempo, el desafío constante de aumentar la producción agrícola en respuesta a la creciente demanda de la población, en este sentido, una incertidumbre importante que tendrá un impacto de largo alcance en las prácticas de producción y el crecimiento de la productividad es el grado de las decisiones que se tomen para mejorar la producción1, así como los efectos del cambio climático sobre el sector con énfasis en América Latina.
Las expectativas de crecimiento poblacional en México para el año 2050 serán de 150,837.517 mexicanos2; por ello, tendrá la tasa de crecimiento poblacional proyectada más alta de los países de la OCDE3. El papel de la agricultura cumple una función de gran importancia, fundamentalmente en países latinoamericanos debido a la demanda de provisiones para la eliminación del hambre y la pobreza, problemas de prioridad significativa, debido a que las economías emergentes latinas tienen que subsanar estos problemas para elevar el desarrollo y calidad de vida.
A lo largo del siglo XXI, los efectos del cambio climático reducirán el crecimiento económico, complicarán los esfuerzos por reducir la pobreza y afectarán la seguridad alimentaria4.
De lo anterior se desprende la importancia de la agricultura y el abasto de alimentos para la población, surge la necesidad de seleccionar las herramientas necesarias para obtener mejores resultados, en políticas públicas y los programas de apoyo a los sectores agrícolas, esenciales para el crecimiento de producción requerido5.
Las actividades de agricultura y sus comportamientos no lineales, necesitan de tecnologías dinámicas basadas en técnicas que proporcionen exactitud, y una mejor comprensión a la toma de decisiones. Aumentar la productividad, reducir tiempo y errores en el cambio de métodos de producción son objetivos principales para el diseño de sistemas de fabricación y producción de vanguardia6.
El uso de técnicas que simulan la inteligencia humana en las computadoras, es una de las más avanzadas, aprovecha las tecnologías de detección y actuadores de vanguardia7: las redes neuronales (RNAs) que han demostrado ser una herramienta eficaz para caracterizar, modelar y predecir una gran cantidad de procesos no lineales8 con resultados adecuados en la toma de decisiones requeridas en problemas agrícolas complejos como son: priorizar y clasificar productos, el reconocimiento de patrones, la predicción de las cosechas y de los cambios físicos de sus productos9.
Aplicación de redes neuronales
Las redes de tipo neuronales artificiales (RNA) son sistemas computacionales de adaptación inspirados en el procesamiento de la información realizado por las neuronas biológicas, como las existentes en los organismos inteligentes10, las cuales tienen una ventaja debido a la disminución del costo de los dispositivos TIC combinada con el bajo peso de los portátiles y el auge de la conectividad inalámbrica11; de igual manera, por la eficacia que los métodos sobre redes tienen en la solución de problemas complejos.
La difusión de estas herramientas para mejorar las decisiones agrícolas en las comunidades científicas son varias; por lo que, la agricultura moderna enfrenta enormes desafíos7 con una gran cantidad de actores que deben mantener una relación cada vez más compleja entre factores ecológicos y políticos globales para garantizar la supervivencia económica y producción sostenible12. Estos desafíos requieren constantemente de la producción de herramientas que minimicen la incertidumbre en la toma de decisiones agrícola.
El presente artículo muestra una exploración a las diferentes técnicas de redes neuronales aplicadas al sector agrícola y los trabajos que se llevan a cabo en esta área. La comprensión de los factores que influyen en la productividad es esencial para el análisis y síntesis de las variables que se correlacionan entre sí, especialmente en los sistemas de producción modernos y de gran escala12, dado que estos sistemas requieren la adopción de una administración diferente, también conocidas como técnicas de agricultura de precisión para optimizar el uso de los insumos, el aumento de la productividad y el beneficio de mejores producciones.
La agricultura de precisión se define como “un conjunto de técnicas que permiten la gestión localizada, y su éxito depende de tres elementos: información, tecnología y gestión”13. Con la creciente adopción de diferentes técnicas de manejo del suelo, tales como fertilizantes a tasas variables y la posibilidad de la adopción de máquinas específicas en la agricultura de precisión, es necesario establecer sitios específicos de gestión diferentes áreas de gestión14. La gestión eficaz de manejo por sitio específico requiere una comprensión de los suelos y de los factores ambientales que afectan a la variabilidad de la producción agrícola; además de ser necesaria para evaluar las técnicas utilizadas para definir estas relaciones15.
El origen de las técnicas surge de entender cómo las propiedades del suelo afectan a la producción, así como la posibilidad de utilizar estos en la predicción del rendimiento de la cosecha, con el fin de definir la gestión de sitios específicos16, planificación de la inversión, la predicción de la productividad y el beneficio.
Estos modelos se pueden basar en redes de sistemas computacionales paralelas, que consisten en unidades de procesamiento simples17, también llamados neuronas artificiales conectadas entre sí de una manera particular para realizar una tarea18.
RNAs han demostrado un alto rendimiento debido a factores tales como ser distribuidos o en paralelo y la estructura robusta conocidas como capas18; la eficiencia en el aprendizaje y la generalización, lo que las hace capaces de resolver problemas complejos; son tolerantes a los valores típicos o "atípicos"19; pueden modelar diferentes variables y sus relaciones no lineales; y por último, permitir el modelado con variables categóricas20.
Actualmente, estas técnicas se desarrollan en una configuración de idoneidad y de parámetros para diferentes situaciones como: las funciones tapper o adelgazamiento del árbol21, el modelado diametral23, el modelo de crecimiento para el corte de eucalipto, los estudios de las características del suelo24; recientemente, para el trigo con la predicción de rendimiento de grano25.
Sin embargo, en la productividad estimada de granos en base a parámetros físicos y químicos del suelo, para establecer la gestión de sitios específicos, el comportamiento de las RNAs no se ha explorado lo suficiente26. No obstante, existe la posibilidad de establecer modelos bioma temáticos capaces de predecir el rendimiento del cultivo en "segunda cosecha" a través de las propiedades del suelo utilizando modelos RNA bioma temáticos o regresión múltiple27.
Un método comúnmente ocupado para evaluar el grado de relación entre las variables involucradas en el proceso de modelado es el análisis de correlación de Pearson28. Secuencialmente, los modelos de diferentes categorías de configuración redes neuronales y regresión múltiple se pueden ajustar para representar estos modelos29. Para estimar la productividad se puede utilizar el método de regresión lineal múltiple de mínimos cuadrados ordinarios:
![]()
Donde Y es el rendimiento promedio de la cosecha (kg) en el periodo a evaluar; MO contenido de sólidos, es decir, el suelo orgánico (mg); CTC Capacidad de intercambio Catiónicos (mmol); V (%) es la saturación de base; RT se define como la resistencia de la arcilla (mg); βi = Estimadores de parámetros a ser ajustados mediante i = 0,1,2,3 y 430.
Las redes neuronales consideran las mismas variables31; sin embargo, las RANs utilizan la inteligencia artificial para resolver los problemas de ajustes, que se forman por elementos de procesamiento simples, estas se activan mediante una función (función activación), para conseguir una respuesta única20. En estas neuronas artificiales, la información de la unidad de procesamiento consiste en entradas de "n" x1, x2,.. Xn (Dendritas) y una salida (axón); las entradas se asocian con los pesos W1, W2..., Wn representando las sinapsis32. Este modelo lo podemos representar de la siguiente manera:
Dónde: Yk= Salida de la neurona artificial; función φ = activación; Vk = Resultado del combinador.
Para utilizar la red, optamos por la técnica de perceptron multicapa donde inicialmente, los pesos de todas las redes se generan al azar. Secuencialmente, esta actualización de valor individual evoluciona durante el proceso de aprendizaje basado en la función del error33.
Las estimaciones de los rendimientos de cosecha se simularán con las posibles combinaciones de variables de entrada, un total de cuatro combinaciones a la variable de respuesta34. La función de activación utilizada en este método es la sigmoidea ya que es la más común en desarrollo de las redes neuronales artificiales20.
El aprendizaje de la red es de tipo supervisada, y la forma más conveniente para entrenarla es dando conjuntos de valores: el conjunto de los valores de entrada y un conjunto de valores de salida35. Por lo tanto, la formación consiste en un problema de optimización de los parámetros de la red (sus pesos sinápticos) para que pudieran responder a entradas como se espera hasta que el error entre los patrones salida generada por la red alcanza el valor mínimo deseado36. Para esto se utilizó el número total de ciclos o épocas iguales a 3,000 o menos de 1% de error cuadrático medio, como lo sugiere37.
Para demostrar este método de mejora en productividad se tienen los siguientes valores, tomados por los laboratorios de fertilab en 2015 como se muestran en la tabla 1:
Tabla 1: Datos estadísticos
| Media | Máximo | Mínimo | Desviación estándar | Cv(%) | |
| Pg (kg) | 5543,20 | 8038.62 | 2056.79 | 1200.88 | 21.66 |
| MO(mg) | 24.7 | 26.80 | 19.66 | 1.68 | 6.79 |
| CTC(cmol) | 6.60 | 7.33 | 5.56 | 0.48 | 5.13 |
| V(%) | 39.04 | 44.10 | 25.28 | 5.13 | 13.14 |
| TA(gr) | 276.03 | 375.00 | 163.97 | 55.86 | 20.24 |
| Correlación entre la productividad (variable dependiente) y predictivo | |||||
| Productividad | MO=0.38 | CTC=0.53 | V(%)=0.45 | TA=0.44 | |
Datos recabados para siembra de precisión 2014, estadísticas elaboración propia.
Redes en toma de decisiones
Tomando en cuenta la tabla anterior, y el método para las redes neuronales del perceptron, podemos obtener la siguiente tabla que es una adaptación en la fórmula para el manejo de patrones mediante una RNA38.
Tabla 2: Red neuronal.
| Modelo de regresión coeficiente ajustado | |||||||||||
| Variable | β0 | β1 | β2 | β3 | β4 | Estadísticas | |||||
| -800.23 | -100.88 | 1050.83 | 16.47 | 4.61 | R2 | ESP | CAIK | CBY | |||
| Redes neuronales | 0.51 | 17.90 | 1535 | 1571 | |||||||
| Neuronas por capa | |||||||||||
| Red | Entradas | Ocultas | Salidas | Estadísticas | |||||||
| Variables | 4 | 4 | 1 | 0.83 | 11.58 | 1130 | 1163 | ||||
| Prod. R | MO | CTC | V(%) | TA | |||||||
Datos para la creación de modelo de elaboración propia.
Donde R2 coeficiente de determinación; ESP (%): el porcentaje de error típico en la evaluación; CAIK: coeficiente de Akaike; CBY: criterios bayesianos: Prod. R: De red ajustado para estimar la productividad de la cosecha.
El comportamiento de las ecuaciones que estiman la productividad, en línea con los errores residuales se muestra en la Figura 1: el ARN puede predecir de forma aceptable la productividad39, el uso de los atributos de la SOM, CTC, V (%) y el contenido de arcilla. Si bien estas mismas variables, cuando se someten a la regresión técnica pierden sus capacidades predictivas14, las estadísticas de retorno inferiores muestran la resolución de la RNA.
La comparación entre la regresión y la RNA por prueba de chi cuadrado (X²); el error estándar de la estimación en forma de porcentaje (ESP%); diferencia agregada y el error medio en términos absolutos se muestran en la Tabla 3. Valores de c² Calculado enfrentado con los valores tabulados no fueron significativos al 95% de probabilidad para el RNA.
Figura 1. Modelado de datos.
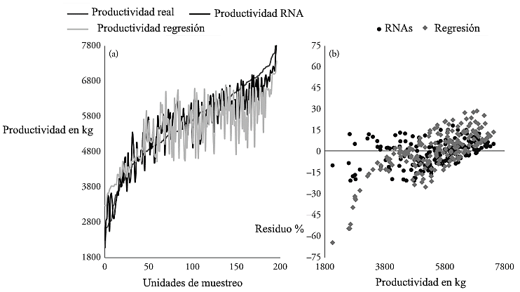
Comportamiento de modelos de regresión / redes neuronales para estimar el rendimiento de productividad mediante las propiedades del suelo, en comparación con los valores reales (a) y el gráfico de distribución residual (b).
Tabla 3. Estadística en red.
| Estadísticas | Chi cuadrado | |||||||
| Variables | Media | Mínimo | Máximo | ESP | DA | Errm | x2 | x2 tab (64 Gl) |
| Producción | ||||||||
| Real | 5656 | 2626 | 7895 | 46.60 | ||||
| RNAs | 5593 | 3060 | 7600 | 14.93 | 11.05 | 123 | 18.55 | |
| Regresión | 5524 | 3450 | 7500 | 23.25 | 21.75 | 285 | 39.45 | |
Diferencia agregada; y el error medio en términos14
Dónde: ESP (%) Error estándar de la estimación como porcentaje; DA Diferencia agregada en porcentaje; Errm (ABS), el error de la media; c² chi-cuadrado calculado; X² tab chi cuadrado tabulados; Gl el grado de libertad de la muestra; 95% de probabilidad.
Como se puede observar la recesión necesita más estudios en el campo, además de su baja disponibilidad, que representa una alternativa de futuro14. Mientras, la RNAs tienen que ser factibles, ya que tiene una alta disponibilidad en áreas con alta producción40. Además de los estudios regionales, con beneficios probados su adopción en el cultivo37.
El análisis de los atributos de la materia orgánica del suelo, la capacidad de intercambio de cationes, la saturación de base y contenido de arcilla mediante la adopción de las redes neuronales artificiales, permite la predicción del rendimiento del cultivo, para la toma de decisiones12.
En tanto, se observó que para sitios específicos de diferente manejo del suelo, la técnica de regresión múltiple tiene inferioridad en las estadísticas que miden la exactitud del modelo y tiende a sobreestimar clases41 de productividad más bajas, así como subestimar a las más grandes.
Tomando en cuenta que las predicciones matemáticas tienen errores de desviación en su propia naturaleza, otras técnicas analizan el problema de la toma de decisiones basados en tratamiento de imágenes mediante redes neuronales.
La incorporación de estadísticas y redes neuronales artificiales puede producir pronósticos altamente satisfactorios del rendimiento del trigo, así como de las consecuencias de la erosión de suelos en las zonas de cosechas42.
La evaluación de la erosión suele tomar mucho tiempo debido al trabajo de campo directo requerido en las áreas afectadas. Un solo evento de lluvia puede cambiar drásticamente el paisaje; por tanto, se requiere un método que permita tener resultados en poco tiempo43.
Las coberturas del suelo mediante imágenes presentan diferentes reflectancias y los pixeles se podrían clasificaren puros y mixtos44. Para medir el rendimiento de la técnica de clasificación de suelos por imágenes se utilizaron imágenes de zonas erosionadas mediante la delimitación de la fotografía con los datos de campo. Esto permite un conocimiento pleno de la fotografía en concordancia con la realidad. La red para la clasificación de la imagen es conocida como propagación hacia atrás45 y se recomienda para la clasificación de patrones mediante la función de transferencia, en su salida de la red mediante la función sigmoidea, que toma los valores de salida entre cero y uno45.
La topología de la red será de cuatro capas; la segunda y tercera capas con seis neuronas, y la cuarta con una (Figura 2).
Los datos de entrada en la primera capa son los valores que tiene un pixel en las bandas R (roja), V (verde) y A (azul), que son los tres colores principales de la composición de la luz (siglas en inglés RGB, de Red, Green, Blue), también conocido como color verdadero de una imagen.
La salida de la red es un vector de tres valores que fluctúan entre cero y uno. Valores de cero o menores de uno, al menos en un elemento del vector, significan que ese pixel no pertenece al patrón o pixel de finido como válido.
Si el valor de los tres elementos del vector es uno, entonces el pixel pertenece al patrón definido. Para que la red reconozca el patrón (pixel deseable) a ser clasificado, se entrena la red con los valores del pixel derivados de la RGB. El entrenamiento de una red neuronal es un proceso interactivo continuo hasta que un conjunto de pesos (valores) es establecido y permite a la red reproducir resultados correctos46.
Figura 2. Topología para la red diseñada.
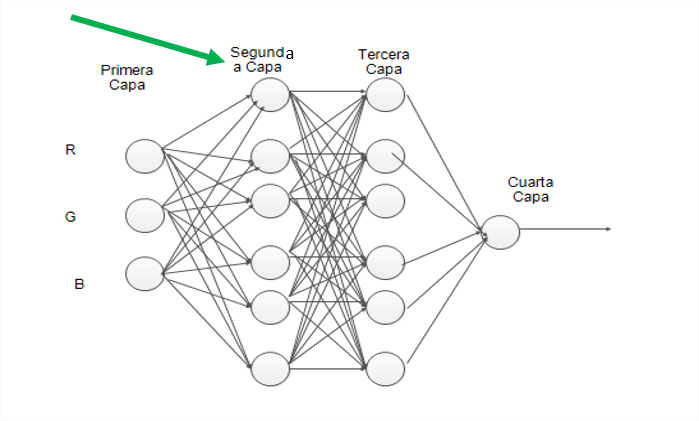
Elaboración propia.
Se digitalizó la imagen para el análisis, así, cada pixel es analizado y clasificado por la red. Con los resultados de la clasificación se crea una imagen binaria, derivada de la clasificación, la cual se forma al asignar un valor de uno (área blanca en la imagen) si el pixel fue aceptado como semejante al patrón a clasificar; si fue rechazado se le asigna el valor de cero (área negra en la imagen) (Figura 3).
Figura 3. Imágenes binarias.
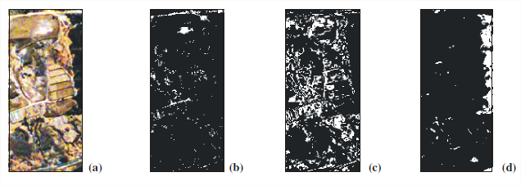
Tomado de (Crop Yield Forecasting Using Artificial Neural Networks, 2014).
Para evaluar los conflictos que se presentan entre las categorías clasificadas y lo real, se construyó la matriz de confusión, que permite conocer el índice Kappa y la fiabilidad de la clasificación. La muestra usada para construir la matriz de confusión se obtuvo con el método de muestreo de conglomerados.
El tamaño de la muestra fue de 271 píxeles que equivale al 1.3% de la imagen original. Se recomienda que el tamaño de muestra debe ser aproximadamente 1% del total de píxeles47. En la matriz de confusión, la diagonal de la matriz expresa el número de puntos de verificación donde hay coincidencia entre las dos fuentes (pixeles clasificados y realidad), mientras que los marginales suponen errores de asignación. La relación entre el número de puntos correctamente asignados y el total expresa la fiabilidad global de pixeles clasificados.
Los residuales en las filas indican tipos de cubierta real que no se incluyó en la clasificación, mientras los residuales en columnas implican cubiertas (píxeles) que no se ajustan a la realidad: en definitiva, representan los errores de omisión y de comisión, respectivamente47.
Respecto a la información de la matriz de confusión, el índice Kappa tiene un valor entre 0.724 y 0.782, que indica una concordancia substancial según Abraira48; por lo tanto, la clasificación es mejor que la esperada por azar. La fiabilidad real es entre 75.24% y 84.76%, considerada bastante fiable, la estimación más pesimista de la fiabilidad está muy cercana a 80%.
La tabla 4 muestra el resultado de la clasificación de suelos y la erosión de los mismos.
Tabla 4. Valores obtenidos.
| Valor medio de pixel | |||||||
| Categorías | R | V | A | Tipo de pixeles | CME | Desempeño de la red | |
| Tepetate blanco | 255 | 255 | 255 | Puro | 2.4x10-12 | 1 1 1 | |
| Tepetate amarillo | 255 | 210 | 60 | Mixto | 3.2x10-12 | 1 1 1 | |
| Árboles | 0 | 65 | 4 | Mixto | 2.3x10-14 | 1 1 1 | |
| Vegetación | 65 | 140 | 135 | Mixto | 3.0x10-11 | 1 1 1 | |
| Cárcavas<20 cm | 240 | 150 | 180 | Mixto | 6.7x10-12 | 1 1 1 | |
| Cárcavas>20 cm | 40 | 200 | 60 | Mixto | 6.7x10-12 | 1 1 1 | |
| Pedestales | 157 | 115 | 58 | Mixto | 1.8x10-10 | 1 1 1 | |
Valores obtenidos por entrenamiento de la red tomado de (Crop Yield Forecasting Using Artificial Neural Networks, 2014).
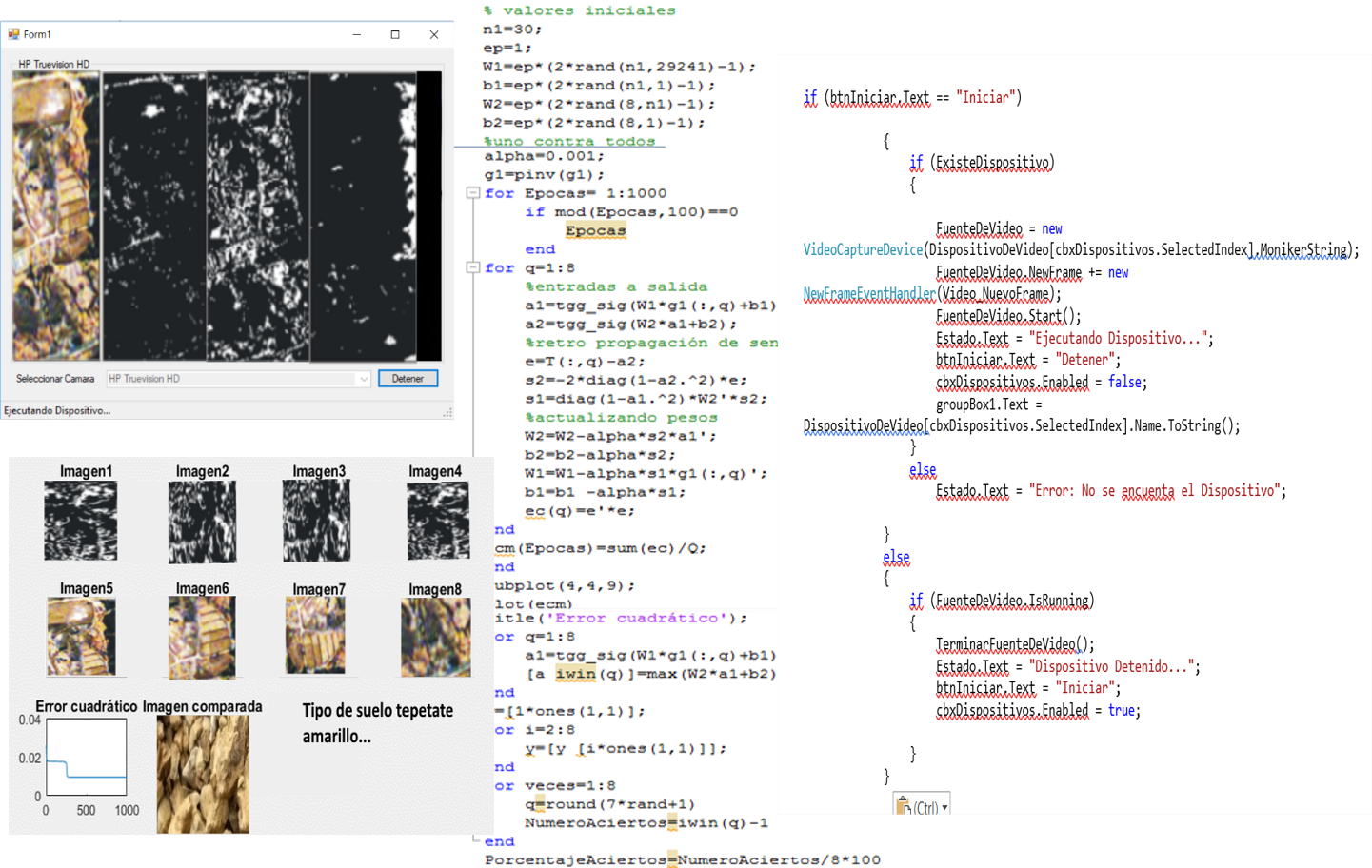
La red neuronal empleada clasifica aceptablemente los pixeles puros de una imagen aérea, considerando el alto porcentaje de pixeles clasificados que representan tepetates blancos, árboles y vegetación. La codificación fue realizada en C#, mediante el cual fueron capturada las imágenes con una Webcam y en comunicación con Matlab desarrollando en este último el algoritmo perceptrón (figura 4). Las clasificaciones son aceptables cuando los pixeles a clasificar tienen reflectancias contrastantes (tepetates blancos, vegetación y árboles). Las clasificaciones de pixeles que representan cárcavas, tepetates amarillos y pedestales no son aceptables porque las reflectancias son similares, esto fue comprobado en el algoritmo codificado realizando pruebas de ejecución del perceptrón.
Figura 4. Software y codificación perceptrón-webcam.
Se considera que la red neuronal realiza clasificaciones aceptables con pixeles puros pero su eficiencia disminuye con pixeles mixtos. La técnica de clasificación de suelos por erosión tiene un nivel aceptable, así como un buen desempeño en cuanto a tiempo de clasificación49; de este modo, la toma de decisiones se ve beneficiada tomando en cuenta la importancia que cada suelo agrícola puede tener para la elección de las semillas a plantar. Como se puede observar, las técnicas de rendimiento en el caso de clasificación del suelo tienen factores adecuados para mejorar las operaciones de la agricultura, sin perder de vista que la operación óptima de este modelo está siendo mejorado continuamente por la investigación.
Conclusiones
De los casos anteriormente estudiados de redes perceptrón y backpropagation para actividades de clasificación de suelos y productividad de granos, se puede observar con claridad que, en los últimos años, las redes neuronales artificiales han adquirido una poderosa capacidad y eficiencia de mapeo no lineal en la investigación de cultivos; en particular, las basadas en recursos de predicción de material para la toma de decisiones.
Al comparar los resultados que permiten a través de un modelo de referencia aplicado al campo y otros modelos tradicionales contra los obtenidos por métodos basados en redes y otros modelos no tradicionales: la agricultura de precisión, tecnologías de observación y de control están ganando terreno. De esta manera, el análisis estadístico y la incorporación de la tecnología son opciones, cada vez más rentables, de gestión sobre el terreno agrícola que permiten compensar la demanda de producción que es requerida para satisfacer las necesidades de la población creciente en diversos países.
La implementación de dicha agricultura de precisión requiere de más desarrollos y modelos para la toma activa de decisiones más eficaces. Sin embargo, el desarrollo y la investigación tienen que estar orientados a la generación de modelos más que radicales para tener circunstancias propicias en la toma activa de decisiones, mediante los cuales la implementación de técnicas modernas que sustituyan a modelos que por décadas se han mantenido, y que mediante esta sustitución se generen los resultados de impacto en la producción agraria.
Referencias
1. OCDE. 2017. Estudios Económicos. OCDE : OCDE, 2017.
2. SEGOB. 2015. SEGOB. DATOS DE PROYECCIONES. [En línea] Gobierno de la Republica, 06 de 12 de 2015. [Citado el: 5 de 03 de 2017.] http://www.conapo.gob.mx.
3. OCDE. 2017. Perspectivas Agrícolas. México : OCDE editors, 2017. págs. 97-100. 23434-32.
4. DINSHAW, A., S. Fisher, H. McGray, N. Rai y J. Schaar. Evaluating Climate Change Adaptation. 2014. 12, s.l. : Wiley Periodical, 2014, documento de trabajo del medio ambiente de la OCDE , Vol. 34.
5. J. ARNO, A. Escola, J. Masip, and J. R. Rosell-Polo,. Influence of the Scanned Side of the Row in Terrestrial Laser Sensor Applications in Vineyards: Practical Consequences. 2014.. 89-3, New York : pringer Science+Business Media, 2014., Precis. Agric., Vol. 23, págs. 119–128. 1573-1618.
6. RENZI, C.,Leali, F.,Cavazzuti, M.,Andrisano, A. A review on artificial intelligence applications to the optimal design of dedicated and reconfigurable. 2014. 67-45, Tahoma : Adv Manuf Technol, 2014, International Journal of Advanced Manufacturing Technology. , Vol. 34, págs. 403-418. 0268-3768.
7. INTELL, Künstl. Special Issue on Artificial Intelligence in Agriculture. 2013. 78, Berlin : Springer-Verlag, 2013, Springer-Verlag Berlin Heidelberg, Vol. 43, págs. 309–311. 0933-1875.
8. GONZALO ASTRAY DOPAZO et. al .Artificial neural networks a promising tool to evaluate the authenticity of wine. 2015. 7, Braga : CyTA – Journal of Food, 2015, CyTA: Journal of food, Vol. 8, págs. 73-78. 1947-6337.
9. FIGUEROA ÁVILA, Javier Antonio Ballesteros Ricaurte. Identificación del estado de madurez de las frutas con redes neuronales artificiales, una revisión. 2016. 34, Tunja : Ciencia y Agricultura (Rev Cien Agri), 2016, Revista Ciencia y Agricultura, Vol. 23, págs. 117-132. 0122-8420.
10. SILVEIRA. Soil prediction using artificial neural networks and topographic attributes. Geoderma,. 2013. 2013, IEEE, págs. 192-197.
11. VALIENTE, Óscar. 2013. in Education: Current Practice, International Comparative Research Evidence and Policy Implications. Chicago : OCDE, 2013. págs. 44-52. 133-133234-33.
12. K, ANDRECUT M and Ali M. A Quantum Neural Network model. 2012. 2, Pensilvania : Springer US, 2012, International Journal of Modern Physics, Vol. 12, págs. 75-88. . 1573-1332.
13. . SRINIVAN, A. Handbook of precision agriculture: principles and applications. 2013. 2013, pág. New York: CRC. 683p.
14. RODRIGUES, M. S., Corá, J. E., & Fernandes, C. Spatial relationships between soil attributes and corn yield in no-tillage System. 2014. 34, Texas : SciElo, 2014, Journal of soil science and plant nutrition, Vol. 1, págs. 367-379. 1806-9657.
15. . J ULYETT, Ruben Sakrabani, Mark G. Kibblewhite,M Hann. Impact of biochar addition on water retention nitrification and carbon dioxide evolution from two sandy loam soils. 2014. 6, Brighton : British Society of Soil Science, 2014, European Journal of Soil Science, Vol. 45, págs. 96-104. 12081-28-258.
16. J. TAKAHASHI, T. Fukukawa, and T. Fukuda. Passive Alignment Principle for Robotic Assembly between a Ring and a Shaft with Extremely Narrow Clearance. 2015. 34, Nevada : IEEE, 2015, IEEE/ASME Trans. on Mechatronics, Vol. 78, págs. 201-220. 15786789.
17. CHENG, W., Zhou, J. J., and Wang, X. Design of Structured-light Vision System for Tomato Harvesting Robot. 2014.. 36, Beijing : Research Center of Intelligent Equipment for Agriculture, 2014., International Journal of Agricultural and Biological Engineering, Vol. 7, págs. 19–26,. 1003-097.
18. CHEVET, Oliver Le Meur and Jean-Claude. Relevance of a Feed-Forward Model of Visual Attention for Goal-Oriented and Free-Viewing Tasks. 2012. 56, Sn : IEEE, 2012, IEEE Transactions On Image Processing, Vol. 7(12), págs. 2801–2813. 2052262.
19. DING JIALI, Peng Shizhang, Xu Junzeng. Calculation method for reference crop evaportranspiration based on temperature data. 2015. 92, Belgium : the American Society of Agricultural and Biological Engineers, 2015, Journal of Hohai Natural Sciences,, Vols. 2013-26773, pág. 633-637. 1063-13031.
20. HAYKIN. 2014. Redes redes neuronales principios practicas. Portugal : Mc wikk, 2014. 1045-9227.
21. HELIO GARCIA LEITE, Daniel Henrique Breda Binoti. Estimation of inside-bark diameter and heartwood diameter for Tectona grandis Linn. 2012. 12, Cordoba : Springer, 2012, Eur J Forest Res, Vol. 56, págs. 34-39. 1612-4669.
22. BINOTI, D. H. B., Binoti, M. L. M. S., & Leite, H.G. ESTIMATION OF FUEL CONSUMPTION IN AGRICULTURAL MECHANIZED OPERATIONS USING ARTIFICIAL NEURAL NETWORKS. 2016. 89, sao paulo : SciElo, 2016, Journal of the Brazilian Association of Agricultural , Vol. 15, págs. 236-147. 1809-4430.
23. RODRIGUES M, José E. Corá, Annamaria Castrignanò, Tom G. Mueller, and Eduardo Rienzi. A Spatial and Temporal Prediction Model of Corn Grain Yield as a Function of Soil Attributes. 2013. 2013, Agronomy Journal, págs. 1878-1887.
24. CASTRO, R. V. O., Soares, C. P. B., Leite, H. G., Souza, A. L. Artificial neural networks in whole-stand level modeling of Eucalyptus plants. 2017. 78, Abaiara : CienciaJournals, 2017, African Journal of Agricultural , Vol. 12(7), págs. 524-535. 1991-637X.
25. SILVA, Aldo A. V. da.Estimativa da produtividade de trigo. 2014. 3, SciElo : Brasileira de Engenharia Agrícola e Ambiental, 2014, Brasileira de Engenharia Agrícola e Ambiental, Vol. 34, págs. 180–187. 1807-1929.
26. DINSHAW, A., S. Fisher, H. McGray, N. Rai y J. Schaar. Evaluating Climate Change Adaptation. 2014. 12, s.l.: wilwy Pweiodical, 2014, documento de trabajo del medio ambiente de la OCDE, Vol. 34.
27. CHEN XIAOQIAN, Luo Shibin, Wang Zhenguo. Research on preprocessing and postporocessing of the application of BP neural network. 2012. 25, Changsha : Systems Engineering-theory & Practice, 2012, Journal Systems Engineering, Vol. 16, pág. 65-70. 1-4244-0604-8.
28. K. HANAWA, T. Yamashita, and Y. Matsuo. Development of a Stereo Vision System to Assist the Operation of Agricultural Tractors. 2012.. 98, Hokkaido : National Agriculture food, 2012., JARQ-JAPAN Agric. Res., Vol. 55, págs. 287–293. 78549-655-585.
29. CHEEIN, F. A. A. and Carelli, R. Agricultural Robotics: Unmanned Robotic Service Units in Agricultural Tasks. 2013.. 21, San Juan : IEEE, 2013., IEEE Industrial Electronics , Vol. 7, págs. Vol. 7, No. 3, pp. 48–58. 1376-9805.
30. KITANO., Hiroaki. Designing Neural Networks Using Genetic Algorithms with Graph Generation System. 2013. 45, Tokyo : Complex Systems, 2013, Complex Systems Journal, Vol. 34, págs. 461–476. CMU-CS-90-100.
31. MIIKKULAINEN., Kenneth O. Stanley and Risto. Competitive coevolution through evolutionary complexification. 2012. 345-56, Texas : Journal of Artificial Intelligence Research, 2012, Journal of Artificial Intelligence Research, Vol. 23, págs. 63–100. 33303–314..
32. MOLLER, J. Computer Vision– A Versatile Technology in Automation of Agricultural Machinery. 2013. 34, Alemania : Bologna, EIMA International,, 2013, Journal of Agricultural Engineering, Vol. 7, págs. 28–36. 13-142010.
33. LIU BINGJUN, Shao Dongguo, Shen Xinping. Reference crop evaportranspiration forecasting model for BP neural networks based on wavelet transform. 2013. 7-5g, Guangzhou : IEEE, 2013, Engineering Journal of Wuhan, Vol. 34, pág. 69-73. 5102-2575.
34. N. MOHRI, N. Saito. Some Effects of Ultrasonic Vibration on the Inserting Operation. 2014. 345-d, Nagoya : Toyota Technological Institute,, 2014, International Journal of Advanced Manufacturing Technology, Vol. 34, págs. 225– 230. 22259-25-486.
35. JIABING, Liu Yu, Lei Tingwu. Daily reference evaportranspiration estimation from weather forecast messages. CAI 2014. 23, Taijin : Agricultural and Forest Meteorology, 2014, Jounal Agricultural Engineering, Vol. 14, pág. 108-111. . 1573-1650.
36. ODHIAMBO L O, Yoder R E, Yoder D C,. Optimization of fuzzy evapotranspiration model through neural training with input-output. 2015. 23, Nebraska : DigitalCommons, 2015, Trans ASAE , Vol. 45, pág. 1625- 1633. 0001–2351.
37. CHEN CHONG, Kelin hu, Tusheng Ren. Estimation of Soil Clay Content using Hygroscopic Water Content at an Arbitrary Humidity. 2013. 65, Beijing : Soil Science Society of America, 2013, Soil Science Society of America Journal, Vol. 78. 3006-0247.
38. S. SAKAI, K. Osuka, T. Maekawa, and M. Umeda. Robust Control Systems of a Heavy Material Handling Agricultural Robot: A Case Study for Initial Cost Problem. 2015. 2, Oregon : IEEE, 2015, IEEE Trans. Control Syst. Technol, Vol. 56, págs. 1038–1048. 1063-6536.
39. STUGES, R. H. A Three-Dimensional Assembly Task Quantification with Application to Machine Dexterity,. 2014.. 2, Sprinfield : IEEE, 2014., International Journal of Robotics Research, Vol. 34, págs. 34– 78. 649880-070-0403.
40. TRAJKOVIC S, Todorovic B, Stankovic M. Forecasting of reference evapotranspiration by artificial neural networks. 2012. 3, Tarjet : IEEE, 2012, Journal of Irrig Drain, Vol. 34, pág. 454-457.
41. SILVA, Aldo A.V. da. Estimativa de productividad de trigo. 2014 3, SciElo: Brasileira de Engenharia Agrícola e Ambiental, 2014, Vol. 34, págs. 180-187. 1807-1929.
42. XUE, William W. Guo and Heru. Crop Yield Forecasting Using Artificial Neural Networks. 2014. 2, San Francisco : Cheng Hung, 2014, Hindawi Publishing Corporation, Vol. 34, págs. 30-37. 8578-6665.
43. A. Trueba-Espinosa, José L. Oropeza-Mota, Carlos A. Ortiz-Solorio, Antonio Martínez-Alcántara y Gabriel Ruelas-Ángeles. IDENTIFICACIÓN DE ZONAS EROSIONADAS MEDIANTE EL TRATAMIENTO DE IMÁGENES DIGITALES CON UNA RED NEURONAL. 2014. 34, México : Journal de Ciencia e ingenieria, 2014, AGROCIENCIA, Vol. 3, págs. 573-581. 1405-3195.
44. Artificial Neural Network for Classification and Analysis of Degraded Soils. A. Bonini Neto, C. S. B. Bonini, B. S. Bisi, L. F. S. Coletta AND A. R. dos Reis. 2017. New Jersey : Reserach Gate, 2017, IEEE LATIN AMERICA TRANSACTIONS, Vol. 5, págs. 503-509.
45. S. CHATTERJEE, S. Nigam, J. B. Singh, Lakshmi N. Upadhyaya. Software fault prediction using Nonlinear Autoregressive with eXogenous Inputs (NARX) network. 2012. 1, Columbia : Springer Science+Business Media, 2012, Applied Intelligence, Vol. 17, págs. 80-86. 0924-669X.
46. EDEN BOJ ORQUEZ, Juan Bojorquez,Sonia E. Ruiz, and Alfredo Reyes-Salazar. Prediction of inelastic response spectra using artificial neural. 2012. 12, s.l. : Hindawi Publishing Corporation, 2012, Hindawi Publishing Corporation, Vol. 2012, págs. 101-106. 383–404.
47. ELIASMITH, C. y Anderson, C. H. 2013. Neural engineering: Computation, representation, and dynamics in neurobiological systems. 56, Chicago : IEEE, 2013, MIT Press, Cambridge, MA., Vol. 67, págs. 125-129. 0-262-05071-4.
48. ABRAIRA. El Índice Kappa. Unidad de Bioestadística Clínica. 2014. 89, Montreal : sf, 2014, SEMERGEN, Vol. 12, págs. 128-130.
49. L, HELIO G, y otros.Estimation of inside-bark diameter and heartwood diameter for Tectona grandis Linn. trees using artificial neural networks. 2014. 2014, Eur J Forest Res, págs. 90-94.
| Fecha de recepción | Fecha de aceptación | Fecha de publicación |
|---|---|---|
| 30/06/2017 | 26/10/2017 | 31/01/2018 |
| Año 5, Número 2. Enero - Abril, 2017 | ||



